Télécharger le fichier pdf d’un mémoire de fin d’études
QUELQUES NOTIONS DE BASE
NOTION DE GEODESIE
Tous les cartographes ainsi que les utilisateurs de Système d’Information Géographique doivent avoir des connaissances de bases concernant la géodésie parce que c’est grâce à elle qu’il est possible de localiser des objets réels ou fictifs à la surface de la terre et ensuite de les représenter sur une carte ou sur un écran.
Le mot géodésie, du mot grec geodaisia qui est l’association de gễ (« Terre ») et de daíô (« diviser » ou « partager »), est la science qui étudie la forme et les dimensions de la terre. Les travaux géodésiques consistent à établir des systèmes de références dans lesquelles des points géodésiques (dont les coordonnées sont déterminées par des mesures astronomiques, spatiales ou encore topométriques) sont matérialiser à la surface de la terre. Ces points géodésiques serviront aussi d’appui pour des levées topographiques ou photogrammétriques afin d’établir des cartes.
Les notions géodésiques qui sont indispensables à l’élaboration d’une carte sont : les surfaces de références géodésiques, les projections cartographiques et finalement les systèmes de coordonnées.
Les surfaces de références géodésiques (géoïde, ellipsoïde)
. Le géoïde est une surface qui comporte des creux et des bosses de quelques dizaines de mètres par rapport à un ellipsoïde. Ce géoïde n’est pas la surface topographique de la Terre, mais un niveau de référence. C’est une surface équipotentielle de pesanteur et qui est représentée comme étant le niveau moyen prolongé sous les continents. Le géoïde sert de zéro de référence pour les mesures précises d’altitude. Mais cette surface irrégulière est difficile à utiliser dans les calculs, et on préfère alors utiliser un ellipsoïde, surface régulière qui lorsqu’elle est bien choisie (centre, dimensions, orientation…) s’écarte au maximum de quelques dizaines de mètres du géoïde, quel que soit le point considéré à la surface de la Terre.
L’Ellipsoïde, une surface qui sert à représenter la terre, est une surface géométrique simple donnant une approximation du géoïde. Cette surface est un ellipsoïde de révolution engendré par une ellipse tournant autour du petit axe. Le petit axe est proche de l’axe de rotation de la Terre et le centre proche du centre de gravité. Dans chaque pays, les services de géodésie ont calculé les paramètres de l’ellipsoïde de référence à partir de leurs propres observations. Les résultats sont bien sûr différents. La précision des observations est variable, mais surtout chacun a adopté l’ellipsoïde qui, localement, colle le mieux avec la forme de la Terre. Depuis l’avènement des mesures spatiales, la tendance est d’employer un ellipsoïde « global », valable pour la Terre entière. Mais cet ellipsoïde n’est qu’une approximation de la forme réelle de la Terre.
La projection cartographique
Pour représenter la Terre sur une carte on projette les objets de la surface de l’ellipsoïde à représenter sur une surface géométrique (cylindre, cône, surface plane) qui sera ensuite développer pour prendre une forme plane (carte). Cette projection fait appel à des transformations mathématiques qui permettent de faire correspondre un point M (ϕ, λ) de l’ellipsoïde à un point m(E, N) du plan.
Il existe une multitude de types de projections et chaque projection cartographique engendre des déformations d’angles, de surfaces et/ou de distances. Les critères à tenir compte lors du choix de la projection sont : la situation du pays, la position à la surface du globe (proximité d’un pôle, de l’équateur) et finalement l’étendue du pays. Les projections cartographiques peuvent être classées de deux manières différentes, soit selon la nature des altérations (déformations) soit en fonction de la construction géométrique qui permet le passage de la sphère au plan.
Selon la nature des altérations, 3 types de projections sont distingués qui sont : les projections conformes (conserve les angles), les projections équivalentes (conserve la surface) et les projections aphylactiques (tend à minimiser les distorsions).
Selon la construction géométrique (figure 2-2), les projections sont classifiées en trois principaux types de projection qui sont : les projections coniques (projection de l’ellipsoïde sur un cône sécant ou tangent à l’ellipsoïde), les projections cylindriques (projection de l’ellipsoïde sur un cylindre sécant ou tangent à l’ellipsoïde) et les projections azimutales (projection de l’ellipsoïde sur un plan tangent en un point ou sécant en un cercle).
Systèmes de coordonnées
Un système de coordonnées est un système de repérage permettant de situer un élément dans l’espace. La position de l’élément à la surface de la terre est précisée grâce à ses coordonnées. Les systèmes de coordonnées sont classés en trois catégories, les systèmes de coordonnées cartésiens, les systèmes de coordonnées géographiques, et les systèmes de coordonnées planes.
Un système de coordonnée cartésien est un système de référence géocentrique (O,X,Y,Z) (Figure 2-3) que l’on positionne par rapport à la terre. Cette référentiel est définit tel que :
Le point O est proche du centre des masses de la terre
L’axe OZ est proche du centre de l’axe de rotation de la terre L’axe OXZ est proche du plan du méridien origine
L’ace OXY est proche du plan de l’équateur
Un système de coordonnée géographique est un système de repérage angulaire, on se repère grâce à la latitude et à la longitude du lieu (Figure 2-5). La latitude d’un lieu est l’angle que fait la normal du lieu avec le plan de l’équateur. Elle est comprise entre 0° à 90° Nord ou Sud. La longitude, quant à elle, est l’angle que fait le méridien du lieu (ligne imaginaire passant par les deux pôles le lieu en question) et le méridien de Greenwich (méridien origine). Les valeurs de la longitude sont comprises entre 0 à 180° Est ou Ouest. Le système de coordonnée le plus connu est le World Geodetic System 1984 (WGS 84) qui est utilisé dans les GPS.
Un système de coordonnées planes, aussi appelé système de coordonnées projetés, est un système de coordonnée utilisé dans les plan et les cartes. Les coordonnées sont déterminées grâce à une projection cartographique. Ces coordonnées sont des coordonnées cartésiennes bidimensionnelles : E (Easting) pour l’abscisse et N (Northing) pour l’ordonnée. Elles sont calculées en fonction de la longitude λ et de la latitude ϕ (figure 2-2).
LE SYSTÈME D’INFORMATION GÉOGRAPHIQUE
Le SIG est un ensemble de divers éléments travaillant étroitement et assurant la gestion, l’analyse et la production d’informations sous forme de carte et de graphique. C’est un outil incontournable dans la gestion de l’espace et dans la localisation d’information.
Les fonctions d’un SIG sont englobées par le terme 5A qui se traduit par : Abstraction, Acquisition, Archivage, Affichage, Analyse. La fonction d’Abstraction consiste à représenter le monde réel en isolant un phénomène ou des informations et ensuite les modéliser ou les représenter cartographiquement. L’Acquisition consiste à intégrer les données dans le système. Les données peuvent être des données extérieures au système et qui peuvent y être importées directement. Elles peuvent aussi être créées manuellement à l’intérieur du système. La fonction d’Archivage, quant à elle, a pour nature de stocker les données. Ces données pourront être réutilisées lors d’autres sessions de travail et par d’autres utilisateurs. Ces derniers n’auront plus à créer de nouvelles données. Grâce aux réseaux informatiques, les utilisateurs pourront avoir accès à une large gamme de donnéees stockées dans de nombreux serveurs. La fonction d’Analyse consiste à décortiquer les donnéées afin de mettre en évidence un phénomène étudié. Le SIG est capable d’effectuer différents types d’analyses (analyse statistique, analyse géographique) sur les données qui ont été intégréess ce qui constitue l’une de ses forces. Pour de nombreuses opérations géographiques, la finalité consiste à afficher les données sous forrme de carte (fonction d’Affichage).
Le SIG est composé par cinq éléments qui sont : les logiciels, les maatériels, le savoir-faire, les utilisateurs et les données. Les logiciels SIG sont des outils informatiqques servant à : gérer, traiter, analyser et représenter lees données. Les logiciels SIG les plus renommmés actuellement sont ArcGis, MapInfo et QGis. Ce deernier est plus avantageux et plus accessible parce que c’est un logiciel libre et gratuit qui posssède une vaste communauté d’utilisateurs laquelle ne cesse de proposer différentes extensions permettant de rendre ce logiciel plus performmant et plus puissant.
Les données sont des deescriptions d’objets, de phénomène, d’espace, d’un lieu ou aussi d’une personne et qui sont innformatisés, structurés et hiérarchisés. En SIG, les données sont présentées sous forme de coucches (figure 2-6) qui possèdent leurs propres informations. Ces couches sont superposables, ce qui permet d’analyser plusieurs phénomènes en même temps.
Il existe deux types de données en SIG et qui sont les données descriptives ou sémantiques et les données graphiques. Les données descriptives sont des informations qui soont stockées dans des tables. Une table est formée par des lignes et des colonnes. Chaque ligne coorrespond à une entité ou enregistrement. Les colonness contiennent quant à elles des informations décrivant l’entité en question. Ces données peuvent être des tables issues des tableurs comme Excel ou aussi des tables créées à partir des logiciels SIG. Les données graphiques quant à elles sont dees données visuelles. Il existe deux types de données graphiques qui sont les vecteurs et les rasters. Les données « vecteur » communément appelées « shapefile » ou fichier de forme sont celles qui décrivent géométriquement les objets à étudier. Il existe trois types de données vecteurs (figure 2-7) qui sont: les points servant à décrire des objets ponctuels comme des poteaux ou aussi une ville dans une carte à petite échelle, les lignes décrivant des objets linéaires comme les routes les réseaux hydrographiques et les polygones décrivant les objets surfaciques c’est-à-dire des objets qui occupent un espace, comme un lac par exemple.
Les données Raster, quant à elles, sont des images de plan ou de carte qui ont été scannés ou aussi des images satellitaires qui sont repérées dans l’espace. Ces rasters sont utilisés pour collecter des informations mais aussi pour les compléter.
Un SIG nécessite au moins un ordinateur comme matériel sur lequel un logiciel SIG est installé et avec lequel les données seront manipulées. Grâce à internet et aux réseaux informatiques, il est possible de travailler sur des ordinateurs ou des serveurs à distance, ce qui permet de travailler rapidement. Le SIG nécessite aussi du personnel qui est chargé d’interagir avec les différents éléments du SIG pour le bon fonctionnement de ce dernier. Ils ont pour rôle de collecter les données, les intégrer dans les logiciels, les analyser grâce à ces derniers et produire des cartes au final. Le dernier et non le moindre, il est indispensable d’avoir le savoir faire concernant les processus nécessaires pour obtenir un résultat tangible et exploitable. Ils font référence aux capacités des personnels à manipuler les autres éléments du système de manière à les faire interagir en vue de répondre aux objectifs fixés.
LE WEBMAPPING
Définition
Le webmapping est l’ensemble de techniques et technologies permettant de produire, modifier, publier et consulter des cartes via le web. Plus qu’un SIG ordinaire, il permet à plusieurs personnes connectées sur le web d’interagir avec une carte en ligne. OpenStreetMap, qui est une base de données cartographique libre du monde, est un exemple parfait de webmapping. Les utilisateurs peuvent, à tout moment, visualiser la carte, mettre à jour la base de données, corriger d’éventuelles erreurs de modification et imprimer une carte. Tout cela se fait grâce à internet, aux logiciels SIG et aux récepteurs GPS.
Principe de fonctionnement
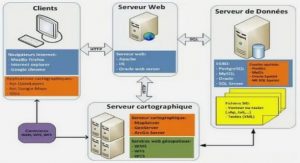
Le Webmapping utilise le réseau internet comme support de communication, celui-ci utilise le protocole de communication TCP/IP (Transmission Control Protocol/Internet Protocol) qui permet à des ordinateurs branchés en réseau d’échanger des informations via un navigateur web ou de transférer des fichiers via le protocole FTTP. L’architecture est de type client/serveur c’est-à-dire qu’il existe une série d’ordinateurs dits clients connectés à un serveur dédié qui lui-même communique vers l’extérieur (www) ou avec des serveurs particuliers par l’intermédiaire de leur matricule : l’IP(Internet Protocol). L’utilisateur, sur sa machine locale, effectue des requêtes pour demander une carte spécifique ; le serveur cartographique interprète cette requête et renvoie la carte sous la forme d’une image matricielle (gif, jpg…) ou vectorielle (svg, flash). L’ordinateur serveur peut chercher ces informations soit dans ses propres ressources soit sur des serveurs de données distantes.
|
Table des matières
INTRODUCTION
PARTIE I. GENERALITES
CHAPITRE 1. PRESENTATION DU THEME
1.1. Contexte
1.2. Problématiques
1.3. Solutions proposées
1.3.1. Collecte de données
1.3.2. Stockage et gestion de données
1.3.3. Analyse et Visualisation des données
1.4. Résultats attendus
CHAPITRE 2. QUELQUES NOTIONS DE BASE
2.1. NOTION DE GEODESIE
2.1.1. Les surfaces de références géodésiques (géoïde, ellipsoïde)
2.1.2. La projection cartographique
2.1.3. Systèmes de coordonnées
2.2. LE SYSTÈME D’INFORMATION GÉOGRAPHIQUE
2.3. LE WEBMAPPING
2.3.1. Définition
2.3.2. Principe de fonctionnement
2.3.3. Fonctions des composants du webmapping
a ) Le client
b ) Le serveur
2.3.4. Normes OGC
PARTIE II. CONCEPTION ET REALISATION
CHAPITRE 3. LES RESSOURCES NECESSAIRES
3.1. LES RESSOURCES MATÉRIELLES
3.2. LES RESSOURCES LOGICIELLES
3.2.1. FrontlineSMS
3.2.2. WampServer
3.2.3. PostgreSQL-PostGis
3.2.4. GeoServer
3.2.5. Leaflet
3.3. LES RESSOURCES HUMAINES
CHAPITRE 4. CONCEPTION DE LA BASE DE DONNÉES
4.1. MODÉLISATION DES DONNÉES
4.1.1. MODÉLISATION DES DONNÉES AU NIVEAU CONCEPTUEL
a ) Création de dictionnaire de données
b ) Conception du Modèle Conceptuel de Données (MCD)
4.1.2. Modélisation des données au niveau logique
4.1.3. Modélisation des données au niveau physique
4.2. IMPLÉMENTATION DE LA BASE DE DONNÉES
4.2.1. Création de la base de données
4.2.2. Implémentation des données
CHAPITRE 5. CONFIGURATION DU SERVEUR SMS
5.1. PRÉSENTATION DE L’INTERFACE DE FRONTLINESMS
5.2. PARAMÉTRAGE D’UNE ACTIVITÉ DE FRONTLINESMS
5.3. TRAITEMENT DES MESSAGES ENTRANTS
CHAPITRE 6. LA MISE EN LIGNE DE LA CARTE
6.1. INTÉGRATION DES DONNÉES DANS GEOSERVER
6.1.1. Création d’un nouvel espace de travail
6.1.2. Création d’un entrepôt de données
6.1.3. Choix de la couche à publier
CHAPITRE 7. RÉALISATION DE LA PAGE DE CARTOGRAPHIE EN LIGNE
7.1. Définition de la mise en page ainsi que des API à utiliser
7.2. Paramétrage de la carte
PARTIE III. RESULTATS OBTENUES ET EVALUATION DU PROJET
CHAPITRE 8. RESULTATS OBTENUES
8.1. VISUALISATION DES DONNÉES
8.1.1. Page visualisation cartographique
8.1.2. Page de visualisation des données sous forme d’histogramme
8.1.3. Page de visualisation des données sous forme de Tableau
8.1.4. Page de récapitulation
8.1.5. Page de visualisation des erreurs
8.2. ADMINISTRATION
8.2.1. Page d’authentification
8.2.2. Page d’insertion
8.2.3. Page d’administration
a ) Outil d’enregistrement
b ) Outil de gestion des membres
CONCLUSION DU CHAPITRE 8
CHAPITRE 9. EVALUATION DU PROJET
9.1. Personnels
9.2. Matériels et outils
9.3. OPERATIONNALISATION DU SYSTEME
9.4. COUT TOTAL DU PROJET
CONCLUSION
REFERENCES
BIBLIOGRAPHIE
Télécharger le rapport complet