Télécharger le fichier pdf d’un mémoire de fin d’études
Les secteurs pionniers en simulation
La simulation est un moyen d’apprentissage utilisé depuis de nombreuses années dans d’autres domaines « à risque » que celui de la santé : l’aéronautique, la marine marchande, et l’industrie nucléaire. Les modalités de simulation sont très différentes, mais elles ont permis de répondre à un double objectif : d’une part l’amélioration de la sécurité dans ces secteurs dits « à risque », et d’autre part la réduction des coûts de formation dans ces domaines (1).
La simulation en aéronautique :
L’aéronautique est considérée comme le berceau de la simulation professionnelle à grande échelle. Les premiers simulateurs de vol sont apparus au début du XXème siècle, quasi en même temps que les avions eux-mêmes. En 1929, Edwin Link inventa la « blue box », le premier simulateur de vol. La répétition des accidents mortels lors de l’entrainement initial sur des machines inconnues a motivé l’intérêt de l’armée américaine avec l’achat de 6 « Link trainers » en 1934, puis de 10.000 exemplaires en 1938. D’abord limitée techniquement à l’environnement de base du cockpit et à l’apprentissage des procédures, la simulation a été de plus en plus précise et réaliste, restituant le vol et le mouvement. Ces outils de simulation qui ont été initialement développés dans le domaine militaire, ont diffusé dans l’aviation civile après la seconde guerre mondiale. Les règlements internationaux de l’aviation civile imposent aujourd’hui la simulation comme outil de formation continue et d’entraînement obligatoire aux procédures et pannes. Les pilotes sont évalués et qualifiés sur cet outil. En plus des pilotes professionnels, la formation initiale et continue sur simulateur s’est imposée dans les années 1980 aux personnels de cabine pour les exercices d’évacuation ainsi qu’aux contrôleurs aériens. Les résultats de l’utilisation de la simulation comme outil de formation en aéronautique sont probants : les économies en prix sont importantes (un vol à vide coûte 50.000 € à 100.000 € selon la machine), et la formation de grande qualité puisque la simulation permet d’entraîner les personnels à ce qu’ils voient tous les jours et à ce qu’ils n’observeront jamais (1,17).
La simulation dans la marine marchande :
La simulation est aussi utilisée dans la marine marchande pour la formation des étudiants et des navigants confirmés. Introduite dès le début des années 1980 pour l’entraînement au travail sur radar, la simulation a depuis étendu son champ d’activité à tous les domaines du navire et augmenté sa fidélité jusqu’au niveau « full mission », niveau permettant par le réalisme des situations de travailler au-delà des tâches techniques sur les comportements en conduite du navire (1).
La simulation dans l’industrie nucléaire :
Dans ce domaine, des simulateurs « pleine échelle » reproduisent les salles de commande, ce qui permet de créer des situations les plus proches de la réalité d’exploitation pour entraîner une équipe à piloter un système technique complexe en collectif (1).
La naissance de la simulation en santé
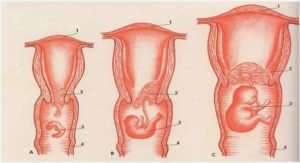
La simulation dans le domaine médical a commencé il y a des siècles dans ses formes primitives. Au XVIIIème siècle, une sage-femme, Madame Du Coudray (18), décide d’enseigner « l’art des accouchements » sur des mannequins (Figure 1A) permettant de récréer des manœuvres obstétricales et forme ainsi durant 25 ans à travers la France 5.000 femmes grâce à la simulation. Cette campagne aurait été suivie d’une nette diminution de la mortalité infantile (1).
A partir de 1910, un mannequin en bois surnommé Madame Chases (Figure 1B), du nom de sa conceptrice fabricante de jouets, sera utilisé par les élèves infirmières du Hartford Hospital Training School of Nurses pour la pratique des soins de nursing. Ce modèle va être perfectionné et sera toujours utilisé par l’armée américaine durant la seconde guerre mondiale (1).
Durant les années 1950, le Professeur Peter Safar du Baltimore City Hospital tente de perfectionner les manœuvres de réanimation cardio-respiratoire. Il met à contribution les membres de son équipe, les volontaires sont alors endormis et intubés. Dans le but de développer un modèle adapté à la réanimation cardio-respiratoire, il va s’associer au médecin Bjorn Lind, et au fabricant de jouet Asmund Laerdal qui fabrique déjà des patients factices pour l’armée. Ils développent ensemble un mannequin connu sous le nom de Resusci-Anne (Figure 1C) au début des années 1960 (1,17,19).
À la même époque, les médecins Stephen Abrahamson et Judson Denson mettent au point le premier mannequin contrôlé par ordinateur, le Sim One (Figure 2A). Il sera le modèle qui inspirera, par ses capacités et son réalisme, les mannequins haute-fidélité actuels (1,17,19).
Toujours dans les années 1960, un autre mannequin de simulation, Harvey (Figure 2B), est mis au point par le Docteur Michael Gordon. Il est entièrement dédié à la cardiologie et peut mimer plus de trente pathologies cardiaques (1,17,19).
Parmi les différentes spécialités médicales, c’est en anesthésie-réanimation que les avancées seront les plus importantes. Par exemple, en 1984, le Docteur Philip développe le logiciel GasMan (20) qui simule les échanges pharmacologiques de différents produits en anesthésie. En 1986, le Docteur Gaba met au point le Comprehensive Anesthesia Simulation Environment (Figure 2C) (21) dans le cadre de ses recherches sur les facteurs humains et la gestion des crises en anesthésie. Ce simulateur était composé d’un simulateur de monitorage, d’une tête d’intubation modifiée et d’un bras de perfusion (1,17,19).
L’amélioration des mannequins a permis de mettre au point des modèles physiologiques de plus en plus développés. L’apparition de la technologie « sans fil » a conduit à la confection de mannequins mobiles pouvant être déplacés, des urgences au bloc opératoire et en réanimation, permettant de créer de vrais scénarios de prise en charge médico-chirurgicale en équipe. En 2007, le premier mannequin haute-fidélité iStan (Figure 2D) bénéficie de ces avancées. La reproduction de la peau est très proche de la réalité, et il comporte quelques modules d’urgences chirurgicales : plaies, traumatologie ostéoarticulaire et trachéotomie (22).
Spécifiquement en chirurgie, la simulation doit permettre l’apprentissage, l’entrainement et la répétition de gestes. Elle existe depuis des siècles avec la pratique de la simulation sur des cadavres ou des modèles animaux. Différentes phases dans l’accès aux sujets anatomiques se sont succédées. Au XIXème siècle, l’approche systématique de l’anatomie a été adoptée. Mais la forte demande de dissection cadavérique a conduit à commettre des actes meurtriers. En 1832, l’Anatomy Act a donc légitimé et régulé la pratique de dissection sur cadavre. Historiquement, les autorités religieuses limitaient la fourniture de cadavres pour la dissection. C’est dans ce contexte qu’a été rédigé le Human Tissue Act en 1961 au Royaume-Uni, autorisant l’utilisation de tissus humains dans un cadre légal à des fins d’enseignement et de recherche. Par la suite, d’autres lois (Anatomy Act en 1984, Anatomy Regulations en 1988, Human Tissues Act en 204) ont limité l’utilisation des tissus humains à des fins d’enseignement uniquement pour les sujets ayant donné leur consentement (12). La limitation de l’accès aux dissections sur cadavre a conduit au développement d’alternatives pour l’apprentissage par la simulation.
La simulation en chirurgie a alors bénéficié de l’apparition des nouvelles technologies et des progrès industriels, permettant l’élaboration de mannequins et de modèles synthétiques de plus en plus perfectionnés, et le développement de la simulation en réalité virtuelle grâce aux progrès en informatique et au numérique. C’est en 1987 qu’a commencé l’utilisation de la réalité virtuelle en simulation chirurgicale grâce à Jaron Lanier. L’un des premiers simulateurs en réalité virtuelle était un simulateur de jambe, le limb simulator (Figure 3A), servant à réaliser des réparations du tendon d’Achille dont le résultat était analysable par la « marche » de la jambe réparée. Le premier simulateur commercialisé en 1983 était le Minimally Invasive Surgery Trainer-VR (Figure 3B), qui combinait un outil d’entrainement avec une image graphique virtuelle, permettant l’entrainement à la chirurgie coelioscopique. Concernant l’Oto-Rhino-Laryngologie (ORL), un outil de simulation sophistiqué dédié à la chirurgie endonasale a été développé en 1994 : l’ENT Sinus Surgery Simulator (Figure 3C) (22).
La simulation pour l’apprentissage de la chirurgie
Place de la simulation pour l’enseignement en chirurgie
L’acquisition des compétences chirurgicales se fait classiquement au bloc opératoire selon un modèle de compagnonnage : le chirurgien expérimenté va montrer et expliquer l’intervention dans un premier temps, puis laisser faire à son interne les différents temps opératoires avec une augmentation progressive de la difficulté des gestes à réaliser, jusqu’à la réalisation par l’interne toujours supervisé par le chirurgien expérimenté de tous les temps opératoires de l’intervention (24). La formation des chirurgiens est enracinée dans cette méthode d’apprentissage avec des niveaux croissants de responsabilité, développée il y a plus d’un siècle, et considérée jusqu’à récemment comme le standard de l’enseignement chirurgical.
Cette méthode d’apprentissage est souvent complétée par d’autres moyens : cours et conférences, vidéos de démonstration chirurgicale, entraînements pratiques par la dissection sur cadavres ou sur modèles animaux. Plus récemment, l’apparition de la simulation pour l’enseignement en santé est venue compléter la formation des internes en chirurgie, permettant la réalisation d’entraînements pratiques sur des supports non organiques : supports synthétiques et électroniques comme la réalité virtuelle. Plusieurs facteurs expliquent le développement et l’intérêt récent pour la simulation en chirurgie :
• Les contraintes législatives limitant la pratique de la dissection (12).
• Les progrès technologiques : informatiques pour la réalité virtuelle, et industriels pour les simulateurs synthétiques.
• L’apparition et le développement de nouvelles approches et technologies chirurgicales, en particulier la laparoscopie et la chirurgie endoscopique.
• La sécurité du patient mise au premier plan : « Primum non nocere ». En 2016, une étude américaine a considéré les erreurs médicales comme la troisième cause de décès des patients (25). La simulation peut être utilisée comme méthode de détection et de prévention de l’erreur(26).
• L’intérêt croissant pour la pédagogie. Associé à l’évaluation de l’efficacité des méthodes d’enseignement, cela a conduit à une remise en cause des méthodes d’enseignement traditionnelles.
• La nécessité de réduction des coûts. La volonté d’améliorer le rapport coût-efficacité concerne tous les domaines de la société, et a aussi gagné le domaine de l’enseignement en santé. En 1999, une étude américaine a évalué le coût de la formation des chirurgiens au bloc opératoire à 53 millions de dollars annuel (27).
• La réduction du temps d’apprentissage au bloc opératoire des chirurgiens en formation. Ce temps d’apprentissage est aujourd’hui réduit par rapport à leur prédécesseur pour deux raisons : les chirurgiens enseignants ont de plus en plus une contrainte de temps opératoire à respecter, et les internes ont bénéficié d’une limitation récente de leur temps de travail diminuant donc le temps clinique et l’apprentissage au bloc opératoire (28). Aux Etats-Unis, l’Accreditation Council for Graduate Medical Education a adopté en 2003 la semaine de 80 heures de travail pour les internes (29). En Europe également, l’European Working Time Directive a réduit en 2009 le temps de travail des internes à une moyenne de 48 heures par semaine (30).
• La judiciarisation de la médecine et de la chirurgie, avec un recours de plus en plus fréquent à la justice de la part des patients.
Validation et intégration de la simulation pour l’enseignement en chirurgie
Beaucoup d’études ont été menées sur l’apport et l’efficacité des supports d’enseignement par simulation dans la formation des chirurgiens. Elles s’accordent pour affirmer qu’ils offrent un complément efficace. Par l’entrainement dans un laboratoire de simulation, un chirurgien peut acquérir des compétences cognitives, techniques et non techniques pour réduire le temps d’apprentissage en salle opératoire et améliorer ses performances. Plusieurs revues de la littérature ont confirmé que l’enseignement par la simulation permettait notamment une amélioration objective des performances des chirurgiens au bloc opératoire, une diminution du temps opératoire, une capacité améliorée à terminer l’intervention, et un taux inférieur d’erreurs per-opératoires (15,31–33).
L’intégration de modules de simulation dans la formation des chirurgiens a été croissante récemment (4,34). Cependant, les pratiques et recommandations concernant la simulation dans les programmes d’enseignement diffèrent selon les pays.
Les Etats-Unis sont un pays précurseur dans le domaine de la simulation. En chirurgie générale, la Society of American Gastrointestinal and Endoscopic Surgeons a lancé en 2004 le programme Fundamentals of Laparoscopic Surgery. Il s’agissait de la première initiative nationale majeure en simulation chirurgicale. Le programme comprenait des modules théoriques et pratiques. La validation de ce programme a ensuite été rendue obligatoire en 2008 par l’American Board of Surgery pour l’obtention du certificat initial (35–37). En 2007, l’American College of Surgeons et l’Association of Program Directors in Surgery se sont associés pour lancer un « National Skills Curriculum », visant à standardiser le cursus de formation des internes en chirurgie en intégrant notamment des modules de simulation (38). Plus spécifiquement en ORL, l’American Academy of Otolaryngology a créé en 2011 l’Otolaryngology Surgical Simulation Task Force. Il s’agissait d’un groupe de travail chargé de faire un état des lieux sur l’intégration de la simulation dans les programmes de formation proposés aux internes en ORL au sein des différentes universités aux Etats-Unis. La majorité des établissements (80 %) ont rapporté avoir incorporé une activité de simulation dans leur programme, avec des moyens disponibles au sein de leur institution (39). Aux Etats-Unis, la simulation fait aujourd’hui partie intégrante de la formation médicale, et la qualité de la formation par simulation représente un argument d’attractivité des établissements de santé (1).
Au Royaume-Uni, la Joint Committee on Surgical Training Strategy 2013-2018 affirme que l’une des priorités actuelles est de maximiser l’utilisation des techniques de simulation dans la formation chirurgicale, considérant qu’il s’agit d’une étape essentielle pour améliorer la sécurité des patients (40). En Australie, le Strategic Plan 2014-2018 du Royal Australian College of Surgeons recommande de promouvoir l’utilisation de la simulation, de soutenir la formation novatrice, et d’établir des partenariats avec les chirurgiens afin d’augmenter la fréquence des séances de simulation (41).
La France semble avoir du retard dans ce domaine par rapport aux pays anglo-saxons. En France, la simulation est une activité émergente qui intéresse de plus en plus le monde de la santé (1). En 2019, la Haute Autorité de Santé recommande l’élaboration d’un programme de simulation en gestion des risques (26). En effet, la sécurité du patient est une préoccupation majeure, et la survenue d’erreurs médicales peut avoir des conséquences lourdes. La simulation pourrait alors être utilisée comme méthode de détection et de prévention de ces erreurs. La Haute Autorité de Santé décrit trois types d’approches de l’utilisation de la simulation pour la gestion des risques. La première approche est la méthode de gestion des risques dite « a priori ». La simulation est utilisée de manière préventive, pour former les professionnels de santé et réduire leur risque d’erreurs potentielles. Il s’agit alors d’entraîner la capacité des équipes à faire face à des situations à haut risque d’erreur et de développer la synergie d’équipe, facteur majeur de la sécurité. La deuxième approche est basée sur l’utilisation du retour d’expérience, c’est la méthode de gestion des risques dite « a posteriori ». Elle consiste à partir d’erreurs médicales, et à reconstruire les situations en simulation afin d’identifier les dysfonctionnements. La troisième approche plus récente est ciblée sur la communication avec le patient, en particulier dans l’annonce de maladie grave, et dans les prises en charge critiques permettant d’atténuer à la fois la souffrance des patients et des professionnels. Ces recommandations de la Haute Autorité de Santé marquent une avancée dans l’intégration de la simulation dans le domaine de la santé en France.
Applications de la simulation pour l’enseignement en chirurgie ORL
Les simulateurs utilisés pour l’enseignement en ORL peuvent être regroupés en trois types: les simulateurs organiques (sur cadavre ou modèle animal), les simulateurs synthétiques, et les simulateurs en réalité virtuelle.
Une revue de la littérature de 2017 a étudié les différents types de simulateurs utilisés en ORL et chirurgie cervico-faciale (42). Les auteurs ont identifié 70 articles décrivant 64 simulateurs : 12 simulateurs pour la chirurgie endoscopique naso-sinusienne, 20 simulateurs pour la chirurgie pharyngo-laryngée, et l’otologie était la sur-spécialité la plus représentée avec 32 simulateurs. Concernant la chirurgie endoscopique naso-sinusienne, il s’agissait de simulateurs en RV, de modèles animaux type ovin, et de modèles synthétiques. Concernant la chirurgie pharyngo-laryngée, il s’agissait essentiellement de modèles synthétiques, suivi de modèles animaux, puis de simulation en RV et sur cadavre. La majorité des simulateurs étaient dédiés à la chirurgie laryngée, il existait également des simulateurs d’amygdalectomie et de thyroïdectomie. Concernant l’otologie, il existait des simulateurs de paracentèse avec pose d’aérateur trans-tympanique : majoritairement des modèles synthétiques, et quelques simulateurs en RV (Western Myringotomy Simulator®). Il existait également des modèles synthétiques de stapédotomie. Les simulateurs pour la chirurgie du rocher étaient les plus représentés en ORL, et sont ceux qui ont fait l’objet du plus grand nombre d’études de validation, notamment pour la technique de la mastoïdectomie. Les simulateurs sur support synthétique étaient les plus nombreux, devant les simulateurs en RV (VOXEL-MAN TempoSurg®, Mediseus Surgical Drilling Simulator®, Visible Ear Simulator®, Ohio State University Simulator®, Stanford Surgical Simulator®), et en dernier la dissection sur cadavre.
Une autre revue de la littérature de 2014 s’est intéressée uniquement à la simulation en réalité virtuelle en ORL (43). Les auteurs ont identifié 21 études de validation : 6 validant des simulateurs en RV pour la chirurgie endoscopique naso-sinusienne (Endoscopic Sinus Simulator®, Dextroscope®), 3 validant des simulateurs en RV pour l’apprentissage de la paracentèse (Western Myringotomy Simulator®), et la chirurgie du rocher était la plus représentée avec 12 études de validation (VOXEL-MAN TempoSurg®, Mediseus Surgical Drilling Simulator®, Ohio State University Simulator®, Stanford Surgical Simulator®).
Dans ces deux revues de la littérature, le simulateur ayant fait l’objet du plus grand nombre d’études de validation en ORL était le VOXEL-MAN TempoSurg®.
Les supports de simulation pour la chirurgie otologique
En chirurgie otologique, la mastoïdectomie est un geste chirurgical à haut risque de complications par atteinte des structures nobles. Les lésions des éléments anatomiques de la région mastoïdienne peuvent avoir des conséquences lourdes pour les patients : paralysie faciale (lésion du nerf facial), surdité et vertiges (ouverture du labyrinthe), méningite (brèche de la dure-mère), hémorragie (lésion du sinus sigmoïde). Il est donc indispensable d’avoir une parfaite connaissance de l’anatomie de la mastoïde et une bonne maitrise de la technique chirurgicale, afin d’anticiper la rencontre de ces structures nobles lors du fraisage et de prévenir les complications (Figure 4). La difficulté associée à la chirurgie otologique explique le développement de la simulation dans ce domaine. Les différents supports de simulation appliqués à la mastoïdectomie ont fait l’objet d’études de validation, et possèdent leurs avantages et inconvénients (13).
|
Table des matières
INTRODUCTION
1. La simulation : définitions
1.1 La simulation en santé
1.2 La réalité virtuelle
1.3 Critères de validation d’un outil de simulation
1.4 Différents types de simulation en santé
2. Histoire de la simulation
2.1 Les secteurs pionniers en simulation
2.2 La naissance de la simulation en santé
3. La simulation pour l’apprentissage de la chirurgie
3.1 Place de la simulation pour l’enseignement en chirurgie
3.2 Validation et intégration de la simulation pour l’enseignement en chirurgie
3.3 Applications de la simulation pour l’enseignement en chirurgie ORL
4. Les supports de simulation pour la chirurgie otologique
4.1 Rocher de cadavre
4.2 Modèles animaux
4.3 Rocher synthétique
4.4 Simulation en réalité virtuelle
4.5 Comparaison des supports de simulation pour la chirurgie otologique
5. Le VOXEL-MAN Tempo®
5.1 Histoire
5.2 Validation
5.3 Coût
5.4 Matériel
5.5 Logiciel
OBJECTIFS
MATÉRIEL ET MÉTHODES
1. Population
2. Schéma de l’étude
2.1 Cours d’anatomie chirurgicale
2.2 Simulation en réalité virtuelle
2.3 Dissection sur os temporal cadavérique
3. Critères d’évaluation
4. Statistiques
RÉSULTATS
1. Population
1.1 Répartition finale de la population
1.2 Caractéristiques de la population
2. Evaluation lors de la dissection
2.1 Echelle d’évaluation de la performance Welling Scale
2.2 Echelle d’évaluation de la technique Task-Based Checklist
2.3 Autres données relevées lors de la dissection
3. Evaluation lors de la simulation virtuelle
4. Comparaison dissection et simulation virtuelle
DISCUSSION
1. Analyse des résultats
1.1 Objectif principal
1.2 Objectifs secondaires
2. Caractéristiques de la population
3. Limites de l’étude
3.1 Population
3.2 Protocole de l’étude
4. Intérêt du VOXEL-MAN Tempo® pour la formation
5. Perspectives
5.1 Intégration de la simulation dans le curriculum des internes d’ORL
5.2 Validité de transfert du VOXEL-MAN Tempo®
CONCLUSION
BIBLIOGRAPHIE
ANNEXES
Annexe 1 : Questionnaire pré-formation
Annexe 2 : Echelle d’évaluation de la performance Welling Scale
Annexe 3 : Echelle d’évaluation de la technique Task-Based Checklist
Annexe 4 : Questionnaire post-simulation virtuelle
Annexe 5 : Questionnaire post-dissection
Télécharger le rapport complet